MECANICA DE SOLIDOS - TEMAS
1. ESTADO GENERAL DE ESFUERZOS
1.1. Elemento diferencial
1.2. Simetría del tenso de esfuerzos
1.3. Esfuerzos
1.3.1. En dos dimensiones
1.3.1.1. Deformación plana
1.3.1.2. Esfuerzo plano
1.3.1.3. Principales esfuerzos
1.3.2. En tres dimensiones
1.3.2.1. En cilindros de pares gruesas sujetas a presión interna y externa
1.3.2.2. Radiales
1.3.2.3. Máximos en vigas curvas
1.4. Planos principales
1.5. Interpretación gráfica del tensor de esfuerzos, mediante el círculo de Mohr
1.6. Tensores de esfuerzo
1.6.1. Generado por carga axial
1.6.2. Generado por carga cortante
1.6.3. Generado por momento torsor
1.6.4. Generado por momento flexor
1.6.5. Generado por presiones internas
1.6.6. Generado por solicitaciones combinadas
2. ESTADO GENERAL DE DEFORMACIONES
2.1. Concepto de desplazamiento de cuerpo
2.1.1. Traslación
2.1.2. Rotación
2.1.3. Alargamiento
2.2. Características de la deformación en un elemento diferencial
2.3. Estado general de deformaciones
2.3.1. Distorsión
2.3.2. Deformaciones principales
2.4. Interpretación de un estado de deformaciones del círculo de Mohr
3. LEY GENERALIZADA DE HOOKE
3.1. Modulo de Young
3.2. Modulo de Poisson
3.3. Modulo de Cortante
3.4. Constante volumétrica
3.5. Isotropía en materiales
3.6. Relaciones esfuerzo – deformación para materiales elásticos
4. MÉTODOS ENERGÉTICOS
4.1. Energía de deformación en los elementos simples sujetos a carga axial
4.2. Aplicaciones del teorema de Castigliano
5. COLUMNAS, UNIONES Y ESFUERZOS
5.1. Columnas con carga concéntrica
5.2. Columnas con carga excéntrica
5.3. Resistencia de juntas múltiples
5.4. Clasificación de los materiales aporte y características
5.5. Resistencia de juntas con carga excéntrica
5.6. Uniones remachadas o atornilladas
5.7. Clasificación de los elementos de sujeción
5.8. Resistencia de juntas múltiples
5.9. Resistencia de juntas con carga excéntrica
CREADO POR:
BARRERA ZENIL MARIO ALBERTO
IBARRA CASTILLO DIEGO ANTONIO
BAEZ GARCÍA JUAN CARLOS FORTINO
1.3 Esfuerzos
Los esfuerzos son el conjunto de
fuerzas internas a las que está sometido un cuerpo a consecuencia de las acciones que actúan sobre él. Estas fuerzas internas son el
resultado de la interacción de unas partículas del cuerpo sobre las otras.
En la siguiente imagen se muestra como actúan los distintos
esfuerzos que existen:

1.3.1 ESFUERZOS EN DOS DIMENSIONES
Un sistema de esfuerzos de dos dimensiones consiste solamente de esfuerzos normales σx y σy , y de esfuerzos cortantes Ʈxy , Ʈyx , los cuales son función de X y Y solamente, se define como un sistema de dos dimensiones o sistemas de esfuerzos plano, un sistema de esfuerzos plano puede existir solamente en placas delgadas. La siguiente figura muestra un elemento sujeto al más general sistema positivo de esfuerzos planos.
1.3.1.1 DEFORMACIÓN PLANA
El esfuerzo plano: requiere que un esfuerzo principal sea igual a cero. Esta situación es común en algunas aplicaciones. Por ejemplo, una placa o un cascarón delgado pueden también tener un estado de esfuerzos plano lejos de sus bordes o de sus puntos de sujeción. Estos casos se pueden tratar con el procedimiento más sencillo de las ecuaciones.
El estado general del esfuerzo y la deformación es tridimensional,
pero hay configuraciones geométricas particulares que pueden ser tratadas de
manera distinta. Esfuerzo plano El estado de esfuerzos en dos dimensiones, es
decir biaxial, también se conoce como esfuerzo plano. Deformación plana: Hay
deformaciones principales asociadas con los esfuerzos principales. Si una de
las deformaciones principales es igual a cero, y las deformaciones restantes
son independientes de la dimensión a lo largo de su eje principal, éste se
conocerá como deformación plana. Esta situación ocurre en geometrías
particulares. Por ejemplo, si una barra larga, sólida, prismática está cargada
únicamente en la dirección transversal, aquellas regiones dentro de ella que
estén lejos de cualquier restricción en sus extremos tendrán en esencia una
deformación igual a cero en la dirección a lo largo del eje de la barra, y se
tratará de una deformación plana. (Sin embargo, el esfuerzo no es igual a cero
en la dirección de deformación igual a cero.) Un dique hidráulico largo puede
considerarse con una situación de deformación plana, en regiones muy lejos de
sus extremos o de su base, donde está sujeto a estructuras vecinas.
1.3.1.2 ESFUERZO PLANO
El esfuerzo plano: requiere que un esfuerzo principal sea igual a cero. Esta situación es común en algunas aplicaciones. Por ejemplo, una placa o un cascarón delgado pueden también tener un estado de esfuerzos plano lejos de sus bordes o de sus puntos de sujeción. Estos casos se pueden tratar con el procedimiento más sencillo de las ecuaciones.
1.3.1.3 ESFUERZOS
El problema principal de la resistencia de materiales es el
de relacionar la resistencia de un elemento mecánico con los esfuerzos internos
producidos por las cargas externas.El caso mas general corresponde a un
elemento cargado en X por esfuerzos de tensión o compresión y un esfuerzo de
corte XY para este caso, los dos esfuerzos normales ejercidos en las
direcciones de los dos esfuerzos cortantes máximos son iguales entre si y
valen:
Sigma1,2 =sigma x / 2 +- SQRT((sigma x / 2)**2 +(Tao.xy)**2
)
De manera similar, los dos esfuerzos cortantes máximos
valen:
Tao1,2 = +- SQRT ( (sigma.x / 2)**2 + (Tao.xy)**2)
Nota: SQRT = raíz cuadrada de
SQ = el cuadrado de
** = elevado al cuadrado
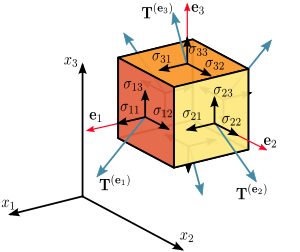


1.3.2 ESFUERZO EN TRES DIMENSIONES
Los
esfuerzos se pueden representar en 3-D, podemos imaginarnos un cubo y sobre el
describir los esfuerzos en el sistema coordenado.
Para
determinar el estado de esfuerzos en un punto se deben definir los esfuerzos
orientados en 3 dimensiones ortogonales entre sí. Esta descripción se hace
mediante el tensor de esfuerzos, que relaciona el vector F (3 componentes) con
el área unitaria A (3 componentes). De los 9 componentes resultantes, 3 actúan
perpendicularmente a la superficie (esfuerzos normales, σn) (σii), i= x, y, z),
y 6 actúan en la dirección paralela a dicha superficie (esfuerzos de cizalla, τ)
Los
esfuerzos normales y esfuerzos
cortantes o de cizalle en las tres
direcciones (x,y,z) y en las tres caras del cubo que estamos imaginando,
podremos observar mejor en la figura siguiente:
1.3.2.1. EN CILINDROS DE PARES GRUESAS SUJETAS A PRESIÓN
INTERNA Y EXTERNA
Un cilindro se
considera de paredes gruesas si el espesor de su pared es mayor que una décima
parte de su radio medio. En estos casos, las variaciones de tensión entre la
superficie interior y exterior se hacen apreciables, y las fórmulas ordinarias
de tensión media no son aceptables.

1.3.2.2 ESFUERZOS RADIALES
Son esfuerzos de dirección normal a la dirección que pasa por el centro de su eje, como por ejemplo una rueda, es axial si soporta esfuerzos en la dirección de su eje, ejemplo en quicio, y axial-radial si los puede soportar en los dos, de forma alternativa o combinada.
1.3.2.3 MÁXIMOS EN VIGAS Y CURVAS
La teoría de vigas a flexión,
presentada en el tema de flexión pura, está limitada a vigas rectas o vigas
levemente curvas con respecto a su altura. Sin embargo, si la relación del
radio de curvatura a la profundidad de (altura) es menor a 5, la fórmula de
flexión (Flexión pura) es generalmente inadecuada para describir los esfuerzos
de flexión en la viga. Para vigas curvas, la teoría de flexión también debe
tomar en consideración la curvatura. En este capítulo es desarrollada una
teoría basada en métodos de mecánica de los materiales. Resultan dos
diferencias importantes con respecto a las vigas rectas a flexión. Primero, la
distribución de esfuerzo flector en una viga curva no es lineal, basado en este
resultado, el eje neutro no coincidirá con el eje centroidal de la sección
transversal, cuando la viga esté sometida a flexión pura. Segundo, una viga
curva conlleva esfuerzos radiales como una consecuencia del momento flector
interno. Estos esfuerzos radiales tienen importantes implicaciones de diseño
para secciones transversales de pared delgada y para materiales (tales como
madera y compuestos unidireccionales) con esfuerzo de tensión relativamente
bajos en la dirección radial.
1.4 PLANOS PRINCIPALES
Los esfuerzos normales y
cortantes en el punto variarán con la dirección en cualquier sistema de
coordenadas que se escoja. Siempre habrá planos sobre los cuales las
componentes de esfuerzo cortante sean igual a cero. Los esfuerzos normales que
actúan sobre esos planos se conocen como esfuerzos
Principales. Los planos sobre los
cuales estas fuerzas principales actúan se conocen como planos principales. La
dirección de las normales de superficie a los planos principales se conocen como ejes principales y los
esfuerzos normales que actúan en estas direcciones se conocen como esfuerzos normales principales.
1.5. INTERPRETACIÓN GRÁFICA DEL TENSOR DE ESFUERZOS, MEDIANTE EL CÍRCULO DE MOHR
Los círculos de Mohr son un método para representar
gráficamente el estado tensional que padece un punto de un sólido en un
instante determinado. Aunque actualmente, gracias a los ordenadores, es posible
calcular las tensiones con gran precisión sin recurrir a estos métodos, siguen
siendo de gran validez puesto que de un solo golpe de vista hacen comprensible
la situación tensional del sólido.
Se organiza con sus ejes mutuamente perpendiculares,
aunque en el espacio real el ángulo entre ellos representa 180º. Todos los
ángulos dibujados en el plano de Mohr tienen el doble de su valor en el espacio
real. La abscisa es el eje para todos los esfuerzos normales. Los esfuerzos
normales aplicados σx, σy y σz, se trazan a lo largo de este eje y los
esfuerzos principales σ1, σ2 y σ3 también se determinan sobre este eje.
figura..

2.1 Concepto de
desplazamiento de un cuerpo
El
desplazamiento es el movimiento para trasladarse de un lugar a otro,
o sustitución de una persona en el cargo, puesto o lugar que ocupa.
El desplazamiento también es considerado como la variación de la posición
de un cuerpo. En el ámbito de la física, el desplazamiento es
un vector cuyo origen es la posición del cuerpo en un instante
de tiempo que se considera inicial, y cuyo extremo es la posición del
cuerpo en un instante considerado final. Cabe señalar, que el desplazamiento no
depende de la trayectoria seguida por el cuerpo sino sólo de los puntos
donde se encuentre en los instantes inicial y final; es
decir, la distancia entre ellos, la cual es expresada
en metros.
Otra definición de
desplazamiento se encuentra en el campo de la marítima, en donde
representa el peso y volumen del
agua que desaloja un cuerpo flotante o buque hasta su línea de flotación
según el Principio de Arquímedes.
Por otro lado, tenemos el término de desplazamiento interno, es aquella
situación en que las personas como resultado de persecución, amenazas que se
ciernen sobre sus vidas, conflicto armado o violencia, se han visto obligadas
a abandonar espontáneamente el lugar donde residen habitualmente y
permanecen dentro de las fronteras de su propio país. Desplazamiento de este
tipo hay en todas partes del mundo.
2.1.1 TRASLACION
El
término que nos ocupa está compuesto por dos vocablos cuyos orígenes
etimológicos coinciden pues ambos provienen del latín. Así, movimiento procede
de movere y traslación emana de translatio que puede definirse como la acción
de llevar algo de un lado a otro.
El estado
de aquel objeto que está cambiando de sitio se conoce como movimiento. El
término está vinculado al verbo mover, que refiere a conseguir que algo salga
de la posición que ocupa y se traslade a una distinta. Sacudir algo también se
conoce como mover.
Traslación,
por su parte, es un concepto con varios usos. Puede tratarse del proceso y de
las consecuencias de trasladar una cosa o una persona de un espacio a otro; de
una clase de figura retórica; de la traducción a un idioma diferente; o del
movimiento desarrollado por un cuerpo que traza una curva de amplio radio
respecto a sus dimensiones propias.

2.1.2 ROTACION
Rotación alrededor de un eje fijo es
un caso especial del movimiento
rotacional. La hipótesis del eje fijo excluye la posibilidad de un
eje en movimiento, y no puede describir fenómenos como el “bamboleo”.
De acuerdo al teorema de la
rotación de Euler, la rotación alrededor de más de un eje al mismo
tiempo es imposible, así pues, si dos rotaciones son forzadas al mismo tiempo
en diferente eje, aparecerá un nuevo eje de rotación. Las siguientes fórmulas y
conceptos son útiles para comprender más a fondo la rotación sobre un eje fijo.
El movimiento
de rotación tiene una estrecha relación con el movimiento lineal.
El
desplazamiento lineal es el producto del desplazamiento angular por el radio
del círculo descrito por el movimiento.
s=θR
La velocidad
lineal es el producto de la velocidad angular por el radio del círculo descrito
por el movimiento.
v=ωR
La aceleración
tangencial es el producto de la aceleración angular por el radio del círculo
descrito por el movimiento.
a=αR
Así mismo,
tomando en cuenta lo anterior, las fórmulas de la cinemática mantienen esta
misma relación.
Para la
cinemática del movimiento rotacional utilizaremos las siguientes:
ω_f ^2 = ω_o
^2 + 2αθ
ω_f=ω_o+αt
θ=ω_o t+1/2
αt^2
2.1.3 ALARGAMIENTO
Se le llama alargamiento a él cambio de
longitud que experimenta un cuerpo debido a una carga axial aplicada sobre el
mismo. También se le llama a la medida de la ductilidad de un material
determinado en un ensayo de tracción. Es el incremento de la longitud del
indicador (medida después de la rotura) dividido por la longitud del indicador
original. Un mayor alargamiento indica mayor ductilidad. El alargamiento no se
puede utilizar para predecir el comportamiento de los materiales sometidos a
cargas repentinas o repetidas.

2.2 CARACTERÍSTICAS DE LA DEFORMACIÓN DE UN ELEMENTO DIFERENCIAL
Los cuerpos completamente rígidos no
existen. Todo elemento se deforma ante la presencia de cargas sobre él, aunque
sea una proporción muy pequeña.

Los cuerpos se
deforman debido a la acción de las fuerzas aplicadas. Para conocer la
deformación de un cuerpo es preciso conocer primero la deformación de uno de
los paralelepípedos elementales que lo forman.
Es un cambio de
longitud de un cuerpo.
· Deformación unitaria
· Longitud original
· Deformación total
Deformación
total: cuando se deforma todo el cuerpo.
Deformación
unitaria: por cada metro cuando se deforma.
Siempre que
existan esfuerzos en un cuerpo ocurrirán deformaciones.
2.3.1 DISTORSION
1. Alteración de un hecho falseando la realidad calificó de distorsión de la historia a lascrónicas medievales.
2. MEDICINA
Torcedura o distensión violenta de una articulación sin dislocación del hueso,con posible rotura de algún ligamento o de fibras musculares. Torcedura, esguince
3. FÍSICA
Deformación de una onda óptica o acústica durante su propagación.
.
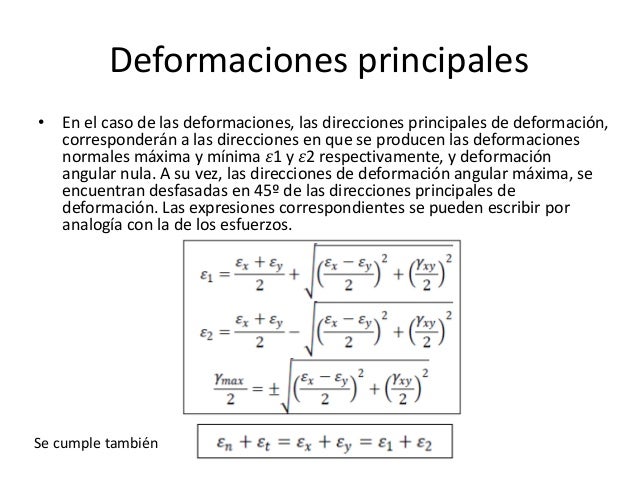
2.3.2 DEFORMACIONES
PRINCIPALES
Al ser el tensor de pequeñas deformaciones simétrico,
se puede afirmar que existirán en cada punto del sólido elástico tres
direcciones perpendiculares entre sí, correspondientes a sendos planos, en los
que no hay distorsión o deformación angular.
2.4 INTERPRETACION
DE UN ESTADO DE DEFORMACIONES DEL CIRCULO DE MOHR
El concepto de círculo de Mohr puede extenderse al análisis
de deformaciones planas ya que las ecuaciones de transformación tienen la misma
forma que las asociadas a la transformación de tensiones. Por lo tanto, se
tiene la relación:

La Ec. 10 representa la expresión analítica de un circulo
de radio d con centro en (c, 0). Considerar la representación gráfica de la Ec.
10 en la Fig. 4

El valor del segmento OC es igual a (εx+ εy)/2 = εavg y
el radio d del círculo está dado por la Ec. 11b. Los puntos A y B, donde el
círculo interfecta el eje longitudinal ε, corresponden a las deformaciones
principales: εmax = εavg + d; εmin = εavg – d. Imponiendo la condición 0 1 1 γ
x y = , se encuentra la condición siguiente:

Que determina los planos principales, es decir, planos
donde se generan la máxima y mínima deformación normal (Fig. 4). La máxima
deformación de corte, cuya magnitud es igual a 2d (diámetro círculo de Mohr –
Fig. 4), se produce en un plano determinado por la expresión:

LEY GENERALIZADA DE HOOKE
LEY DE HOOKE
La
ley de Hooke es la cantidad de estiramiento o compresión (cambio de sentido),
es directamente proporcional a la fuerza aplicada. De donde; F es la fuerza
deformadora aplicada, K es la constante de elasticidad y x la deformación
relativa. El máximo esfuerzo que un material puede soportar antes de quedar
permanentemente deformado se denomina límite de elasticidad. Estos tipos de
esfuerzos mencionados están muy presentes en nuestra vida, como podemos ver en
estructuras, muelles, objetos apoyados en superficies, cuerdas, etc.
3.1 MODULO DE YOUNG
El módulo de Young o módulo de elasticidad longitudinal es un parámetro que caracteriza
el comportamiento de un material elástico, según la
dirección en la que se aplica una fuerza. Este comportamiento fue observado y
estudiado por el científico inglés Thomas
Young.
Para
un material elástico lineal e isótropo, el módulo de Young tiene el mismo valor para una tracción que para una compresión,
siendo una constante independiente del esfuerzo siempre que no exceda de un
valor máximo de-nominado límite
elástico, y es siempre mayor que cero: si
se tracciona una barra, aumenta de longitud.
Un material con módulo de Young menos que otro, se deforma mas.

3.2 MODULO DE POISSON
Cuando
un cuerpo es colocado bajo un esfuerzo de tensión, se crea una deformación
acompañante en la misma dirección. Como resultado de esta elongación, habrá
constricciones en las otras dos direcciones, el coeficiente de Poisson (V) es
la relación entre las deformaciones lateral y axial.


3.3 MÓDULO DE
ESFUERZO CORTANTE:
actor de elasticidad de un
material que representa la relación entre el esfuerzo cortante y la
correspondiente deformación producida por éste. También llamado módulo de
elasticidad transversal.F

3.4 CONSTANTE VOLUMETRICA
Es
aquella en que predomina la variación en tres dimensiones, o sea, la variación
del volumen del cuerpo, este fenómeno se ve dado por la siguiente formula;
ΔV=ᵧVoΔT
Donde;
ΔV representa
el aumento de volumen del cuerpo.
Vo
representa el volumen inicial.
ΔT es
el cambio de temperatura.
Ahora
ejemplifiquemos esto para lograr tener un mejor entendimiento.
El
volumen inicial del mercurio es de 30 cm3, pero este sufre un cambio
de temperatura de 10° a los 60°.
¿Cuál
será su volumen final?
ΔV=ᵧVoΔT
ΔV=0.18*10-3(30
cm3) (60°-10°)
ΔV=0.27cm3
Nota;
los valore de β, ᵧ, ᾳ, fueron tomado de las siguientes tablas, las cuales
representan los coeficientes de dilatación en sus distintas formas.
Sustancia ᾳ
(1/°c)
Aluminio 23*10-6
Cobre 17*10-6
Zinc 26*10-6
Vidrio común 9*10-6
Vidrio pírex 3.2*10-6
Plomo 29*10-6
Sílice 0.4*10-6
Acero 11*10-6
Aluminio 23*10-6
Cobre 17*10-6
Zinc 26*10-6
Vidrio común 9*10-6
Vidrio pírex 3.2*10-6
Plomo 29*10-6
Sílice 0.4*10-6
Acero 11*10-6
Diamante 0.9*10-6

3.5 ISOTROPIA EN MATERIALES
Un
material es isótropo cuando sus propiedades no dependen de la dirección según
la cual ellas son medidas. Es decir, cuando una propiedad tiene el mismo
valor independiente de la dirección según la cual se hace la medida. Los
materiales amorfos (o no cristalinos) son estrictamente isótropos. Ello se debe
a que no presentan direcciones que difieran entre sí en su tipo de orden
atómico lineal, por no haber orden cristalino. Isotropía por compensación en
policristales Frecuentemente en ingeniería, particularmente para aplicaciones
estructurales, se emplean policristales. En ocasiones, los policristales
formados por muchos granos (granos que son monocristales anisótropos), pueden
ser considerados, en promedio, como isótropos, según se verá. Particularmente
cuando la estructura de un policristal está recocida, se pueden tener granos
con las siguientes tres características de estos: Finos: el tamaño de grano es
suficientemente pequeño como para que, en la sección consi-derada haya muchos
granos. De forma equiaxial: en el material no hay direcciones preferenciales al
mirar los granos, por ejemplo, en un microscopio óptico. Con orientaciones
cristalinas al azar: por ejemplo, en un policristal de cobre, de estructura
CCC, los ejes OX-OY-OZ de distintos granos, ejes correspondientes a las aristas
de las celdas cristalinas respectivas, están orientados al azar.
3.6 RELACIÓN DE ESFUERZO Y
DEFORMACIÓN.
Muchos materiales alcanzan un estado en el cual la deformación comienza a crecer
rápidamente sin que haya un incremento correspondiente en el esfuerzo. Tal
punto recibe el nombre de punto de cedencia o punto de fluencia.
Se define la resistencia de cedencia o fluencia Sy mediante el método de corrimiento paralelo.
El ensayo de tracción consiste en someter a una probeta
normalizada realizada con dicho material a un esfuerzo axial de tracción
creciente hasta que se produce la rotura de la probeta. Para ello se coloca la
probeta en una máquina de ensayo consistente de dos mordazas, una fija y otra
móvil. Se procede a medir la carga mientras se aplica el desplazamiento de la
mordaza móvil.
4. MÉTODOS ENERGÉTICOS
4.1 ENERGÍA DE DEFORMACIÓN EN LOS ELEMENTOS SIMPLES SUJETOS A CARGA AXIAL.
Para continuar, recordaremos algunos conceptos básicos:
ESFUERZO: Es la razón de una fuerza aplicada respecto al área sobre
la que actúa.
ESFUERZO=FUERZA
/
DEFORMACIÓN:
Cualquier cambio de
dimensión o de forma que sufre un material debido a las fuerzas que actúan sobre
este. El esfuerzo normal se acompaña de una deformación axial.
DEFORMACIÓN
AXIAL: Es aquella debida a
la aplicación de una carga axial F y
se basa en la Ley de Hooke.
DIAGRAMA
ESFUERZO-DEFORMACIÓN
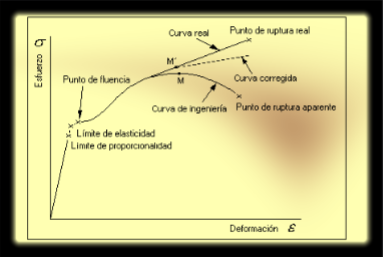
Límite
de proporcionalidad: Es
el punto después el cual el esfuerzo deja de ser proporcional a la deformación.
Límite
de elasticidad: Donde el
material se deforma plástica-mente, es decir que recupera su forma original al
ser descargado.
Punto
de fluencia: Es aquel con el
que aparece un considerable alargamiento sin el correspondiente aumento de
carga.
Límite
de resistencia: Es el punto del
diagrama en el que se alcanza el valor máximo del esfuerzo.
Límite
de ruptura: En donde el
material se fractura.
Ejemplo
simple:
Para la deformación axial tenemos una barra BC, de longitud L y sección transversal A,
que está suspendida de B. Si se
aplica una fuerza P en el extremo C, la barra se alarga.

CARGAS
AXIALES DE TRACCION O COMPRESION
Una barra recta está sometida a cargas de tracción o compresión
y a su vez también es sometida a fuerzas paralelas a su eje central. Dependiendo
si la carga tiende a estirar o a comprimir la pieza, la carga será de tracción o
de compresión.

DEFORMACIONES
PROVOCADAS POR CARGAS AXIALES
Una barra sometida a cargas axiales además de
experimentar deformación según la dirección de la fuerza, el cuerpo también se
deforma en las direcciones normales a ella. La tracción provoca alargamiento
con adelgazamiento y la compresión acortamiento con ensanchamiento.
4.2 TEOREMA
DE CASTIGLIANO
La derivada parcial del trabajo de las
fuerzas internas en relación a una fuerza actuante provee el desplazamiento
correspondiente a la fuerza considerada en la dirección de acción de la fuerza
en cuestión.
Este teorema se expresa de la siguiente
manera:

El teorema de Castigliano puede ser utilizado en la determinación de las reacciones de apoyo de estructuras estáticamente indeterminadas y en cualquier deformación.
Ejemplo: Consideramos una viga AB, sobre la
cual está siendo aplicada una carga uniforma w y una fuerza P en su extremo.
Siendo O el largo de la vida de 2m, w= 4 kN/m, E.I = 5 MN.m2 y P = 6 kN
determine la deflexión lineal en el punto A.

La resolución sería:
Y el momento flector sería:

Sustituyendo los valores dados en el ejercicio
tendremos que

5. COLUMNAS, UNIONES Y ESFUERZOS
COLUMNAS
Una columna es un
elemento cargado axialmente, sometido a compresión, el cual tiene su sección
transversal muy pequeña comparada con su longitud, por lo que al aplicársele una carga,
fallará primero por pandeo, antes que por aplastamiento. Las cargas que puede soportar una columna pueden ser concéntricas, cuando se aplican sobre su centroide,o excéntricas, cuando se aplican a cierta distancia de su eje centroidal.
Cuando se
incrementa la longitud de una columna, disminuye su capacidad de soportar
carga. Cuando la excentricidad es pequeña y la columna es corta, la flexión
lateral es despreciable, comparada con el efecto de la compresión; por el contrario
al aumentar la longitud, una pequeña excentricidad puede producir un gran
esfuerzo de flexión. Las columnas se pueden clasificar en:
a) cortas.-
las cuales simplemente se aplastan o comprimen y el esfuerzo se determina
por la ecuación.
b) intermedias.
c) largas.
5.1 COLUMNAS
CON CARGA CONCENTRICA
Cuando la carga se aplica
sobre su centroide.
5.2 COLUMNAS
CON CARGA EXCENTRICA
Cuando la carga no se aplica directamente
en el centro de la columna, se dice que la carga es excéntrica genera
un momento adicional que disminuye la resistencia del elemento, de igual forma,
al aparecer un momento en los extremos de la columna debido a varios factores,
hace que la carga no actúe en el centro de la columna. Esta relación del
momento respecto a la carga axial se puede expresar en unidades de distancia
según la propiedad del momento, la distancia se denomina excentricidad. Cuando
la excentricidad es pequeña la flexión es despreciable y cuando la
excentricidad es grande aumenta los efectos de flexión sobre la columna.
Las Propiedades de los
materiales son el conjunto de características que hacen que el
material se comporte de una manera determinada ante estímulos externos como la
luz, el calor, las fuerzas, el ambiente, etc.…
Los materiales que se
necesitan para elaborar un determinado producto se diferencian entre sí y los
vamos a elegir en función de sus propiedades.
Las propiedades de los
materiales se pueden agrupar en base a distintos criterios. Nosotros, desde un
punto de vista técnico, vamos a establecer la siguiente clasificación:
- Propiedades sensoriales
- Propiedades físico químicas
- Propiedades mecánicas
- Propiedades tecnológicas
5.6 UNIONES REMACHADAS O ATORNILLADAS
Las
cabezas tienen un diámetro mayor que el resto del remache, para que así al
introducir éste en un agujero pueda ser encajado. El uso que se le da es para
unir dos piezas distintas, sean o no del mismo material.
Aunque
se trata de uno de los métodos de unión más antiguos que hay, hoy en día su
importancia como técnica de montaje es mayor que nunca. Esto es debido, en
parte, por el desarrollo de técnicas de automatización que consiguen abaratar
el proceso de unión.
- No es adecuado
para piezas de gran espesor.
- La resistencia
alcanzable con un remache es inferior a la que se puede conseguir con un
tornillo.
- La unión no es
desmontable, lo que dificulta el mantenimiento.
- La unión no es
estanca.
5.7. CLASIFICACIÓN DE LOS ELEMENTOS DE SUJECIÓN
1- Remache
Un remache es un rodillo cilíndrico con
un solo extremo sobresaliente. Esta pieza se coloca entre los elementos objeto,
y luego se complementa colocándole una cabeza en el otro extremo para fijar la
unión.
Los remaches generalmente están
fabricados a base de aluminio, acero, cobre o latón.
2- Soldadura
Consiste en la unión de dos o más
piezas metálicas mediante la aplicación de calor (arco eléctrico) y presión,
empleando el metal de aportación como mecanismo de unión.
Este metal suele tener una temperatura
de fusión considerablemente inferior con respecto al material que conforma las
piezas objeto. El estaño es de uso común en este tipo de aplicaciones.
3- Tornillo
Es un elemento tubular con una cabeza
sobresaliente en uno de sus extremos y una rosca en el otro, lo cual permite su
uso en función de sujeción, transmisión de fuerza o ajuste entre dos elementos.
Los tornillos suelen ser de acero, pero
también es factible encontrar tornillos de hierro, plomo, bronce, aleaciones
metálicas, plástico e incluso madera.
4- Tuercas
Estas piezas cuentan con un orificio en
el centro, una rosca interna, que permite su uso en el acoplamiento con un
tornillo para complementar la unión entre dos piezas.
La rosca de la tuerca puede ser
hexagonal, cuadrada, de mariposa o hexagonal ciega.
5- Abrazadera
Es una pieza ajustable que, tal como su
nombre lo indica, abraza a la pieza de acople, la cual generalmente es
cilíndrica.
Las abrazaderas pueden ser metálicas o
plásticas; el material de uso dependerá directamente de la aplicación final.
6- Pernos
Es una pieza metálica similar a un
tornillo, pero mucho más grande. En el extremo inferior (la parte enroscada)
suele enroscarse una tuerca o se coloca un remache, con la finalidad de sujetar
dos o más piezas de tamaño importante.
7- Arandelas
Es una pieza circular o hexagonal con
un orificio en el centro. Es empleada para sujetar mecánicamente tuercas o
tornillos a una estructura y evitar su desplazamiento.
Las arandelas aseguran la hermeticidad
de la aplicación y evitan cualquier tipo de fuga a través de la unión de las
piezas. Por ende, su uso en aplicaciones de plomearía es muy común.
5.8. RESISTENCIA
DE JUNTAS MÚLTIPLES
La resistencia a cortante en las juntas secas es una
parte importante del diseño de estructuras de dovelas potenzadas. Sin embargo,
la formulación de las distintas normativas no se ajusta al comportamiento de
las juntas con llaves múltiples. En este trabajo se analiza el comportamiento
en fractura de las juntas secas con llaves bajo solicitaciones de cortante,
centrándose en la influencia del número de llaves en la resistencia de la junta
y la tensión tangencial media.
5.9. RESISTENCIA
DE JUNTAS CON CARGA EXCÉNTRICA
Cuando la carga sobre una junta soldada
se aplica excéntricamente, el efecto del par o momento debe tomarse en cuenta
así como la carga directa. El estado de esfuerzo en tal junta es complicado y
es necesario hacer hipótesis simplificadoras.
Cuando una junta consta de varios cordones de soldadura, es costumbre suponer que el esfuerzo por momento en cualquier punto es proporcional a la distancia desde el centro de gravedad del grupo de soldaduras.
Cuando una junta consta de varios cordones de soldadura, es costumbre suponer que el esfuerzo por momento en cualquier punto es proporcional a la distancia desde el centro de gravedad del grupo de soldaduras.
